Google DeepMind y el Robot de Tenis de Mesa: Un Alcance Amateur Humano en Robótica Competitiva
Resumen
En agosto de 2024, Google DeepMind anunció el desarrollo de un sistema robótico capaz de competir en tenis de mesa a nivel humano amateur, ganando aproximadamente el 45 % de los partidos frente a 29 jugadores humanos de distintos niveles Convo Media+6TechCrunch+6Interesting Engineering+6. Este logro representa un avance notable en el ámbito de robótica física, aprendizaje automático en tiempo real y adaptación estratégica, marcando un hito en la integración de sistemas autónomos en entornos dinámicos con interacción humana directa.
Introducción
DeepMind —la filial de inteligencia artificial de Alphabet— ha sido ampliamente reconocida por sus éxitos en dominios estratégicos como Go (AlphaGo) y modelado de proteínas (AlphaFold) Wikipedia+1Wikipedia+1. Con el tenis de mesa han elevado sus desafíos: combinar percepción en tiempo real, control físico de alta velocidad y decisiones tácticas en una tarea deportiva compleja.
Metodología y Arquitectura del Sistema
El robot utiliza un brazo industrial ABB IRB 1100 combinado con una arquitectura modular que articula:
- Controladores de bajo nivel especializados en habilidades (por ejemplo, efectos de spin, golpes de derecha y revés).
- Controlador de alto nivel, encargado de seleccionar la habilidad adecuada según la situación de juego, alineando estrategia y ejecución física IEEE SpectrumLive Science+6arXiv+6Interesting Engineering+6.
El entrenamiento fue híbrido: se empleó aprendizaje por refuerzo en simulación (sim-to-real zero-shot) con adaptación real automática, complementado por iteraciones contra oponentes humanos no vistos durante la fase de entrenamiento IEEE Spectrum.
Resultados Experimentales
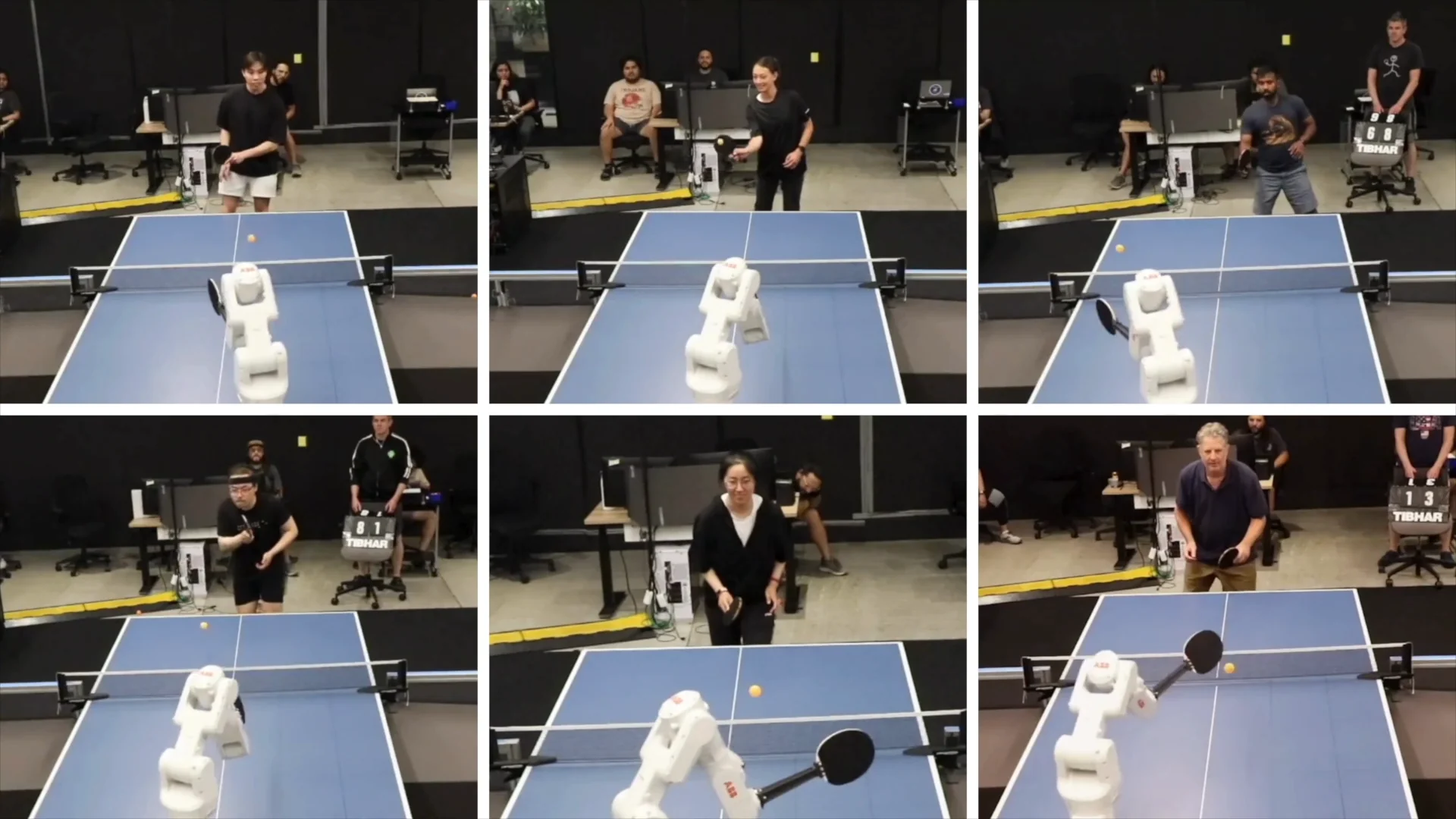
Se enfrentaron los robots a 29 jugadores humanos desconocidos, con distintos niveles de habilidad puntuados por un instructor profesional. Los principales resultados:
- Victoria en el 100 % de los partidos contra jugadores principiantes.
- Aproximadamente 55 % de victorias contra jugadores intermedios.
- Derrota sistemática frente a jugadores avanzados o de alto nivel.
- Victoria total en alrededor del 45 % de los partidos jugados arXiv+5arXiv+5Live Science+5Interesting EngineeringTechCrunch.
Este comportamiento posiciona al sistema como un jugador humano “amateur sólido” según estándares competitivos.
Análisis Crítico
Fortalezas
- El enfoque modular permite añadir y mejorar habilidades específicas sin reentrenar todo el sistema.
- La transferencia sim‑to‑real sin entrenamiento adicional en el mundo físico demuestra efectividad en entornos reales.
- La adaptación en tiempo real a oponentes no vistos, con mejora continua durante la competencia, sugiere robustez táctica TechCruncharXiv+1IEEE Spectrum+1.
Limitaciones
- El robot no puede servir la pelota, lo cual requiere adaptaciones en el entorno de partido Interesting Engineering.
- Tiene dificultades con pelotas muy rápidas, jugadas altas o bajas, y especialmente alta rotación (spin), debido a la falta de sensores precisos de spin o de visión ultra-rápida arXiv.
- Se comporta peor que jugadores humanos avanzados, evidenciando el desafío persistente de alcanzar más allá de un nivel amateur.
Relevancia e Implicaciones
Este trabajo representa un avance substancial en robótica cognitiva, al demostrar que un robot puede competir contra humanos en un dominio físico, rápido y realista. Representa una prueba de concepto para aplicaciones potenciales en entrenamiento deportivo, rehabilitación motriz, educación interactiva y tareas industriales que requieran alta precisión y adaptabilidad.
Asimismo, se enmarca dentro de una visión investigativa hacia robots auto-mejorables mediante entrenamiento continuo y competencia (incluida robótica contra robótica), lo cual fue explorado recientemente por DeepMind como camino hacia sistemas más autónomos y robustos kjzz.org+2Interesting Engineering+2Live Science+2IEEE Spectrum.
Conclusión
El robot de tenis de mesa de DeepMind logra por primera vez un desempeño competitivo a nivel amateur humano mediante una arquitectura modular y adaptativa entrenada en simulación y afinada en entornos reales. Aunque tiene limitaciones contra jugadores expertos y en ciertos escenarios físicos desafiantes, el trabajo constituye un paso significativo hacia robots interactivos, autónomos y físicamente hábiles. En última instancia, este logro redefine la frontera entre la inteligencia artificial de laboratorio y las capacidades robóticas útiles en entornos deportivos y cotidianos.